
Les boucles for
La structure en boucle for permet d’exécuter un nombre fini de fois une séquence d’instructions. La forme générale d’une boucle for est la suivante : for (int t=0; t<10; t++) { // instructions à...

Tout ce qu'il faut savoir pour utiliser un Arduino
La structure en boucle for permet d’exécuter un nombre fini de fois une séquence d’instructions. La forme générale d’une boucle for est la suivante : for (int t=0; t<10; t++) { // instructions à...

Les moteurs Brushless sont de plus en plus fréquemment utilisés en raison de leurs performances nettement supérieures à celles des moteurs à courant continu « classiques ». Mais contrairement à ces derniers, leur commande est plus...

Un détecteur optique (ou interrupteur optique) est une barrière infrarouge : un émetteur : une LED infrarouge un récepteur : un phototransistor Câblage Programmation Selon l’usage on peut utiliser les programmes suivants...
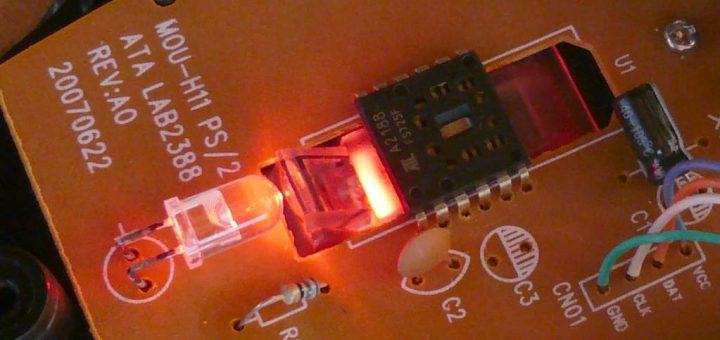
sources : https://github.com/rucek/arduino-ps2-mouse Les souris optiques peuvent être considérées comme des capteurs de déplacement à deux dimensions. Matériel testé : souris Trust 15390 Bibliothèque utilisée : https://github.com/rucek/arduino-ps2-mouse La souris testée est de technologie optique...

La très grande majorité des imprimantes à jet d’encre possède des codeurs incrémentaux, qui ont l’immense avantage d’être de grande précision. On y trouve de grandes roues (mouvement de rotation) ou de grandes bandes...

Les résistances sont des dipôles (deux pôles) passifs, dont le rôle dans un circuit est de s’opposer au passage du courant électrique. Ils sont caractérisés par leur résistance, exprimée en Ohm [Ω] Leur relation...

Les vieilles souris à boule comportent de petits codeurs incrémentaux. On identifie rapidement : l’émetteur (deux pôles), le récepteur (3 pôles) et le disque Câblage Le câblage est simple : Une résistance pour contrôler...

Un codeur incrémental est un capteur de position (linéaire ou angulaire). Principes de fonctionnement Quelle que soit la technologie, l’information de position est basée sur la détection et le comptage de « zones détectables » placées...

source : https://www.carnetdumaker.net/articles/mesurer-une-temperature-avec-un-capteur-1-wire-ds18b20-et-une-carte-arduino-genuino/ Matériel testé : sonde Dallas DS18B20 (datasheet MaximIntegrated) Bibliothèque nécessaire : OneWire Le capteur DS18B20 est un capteur de température numérique intégrant : un capteur analogique un convertisseur analogique / numérique...